RTC Bugfix
Da war ein kleiner Bug in meinem Code beim setzen der Alarmzeit:
// Use DS3231_ALARM1_MATCH_SECMINHOUR for Demo purposes (matches seconds)
ds3231_set_alarm(&dev, DS3231_ALARM_1, &alarm_time, DS3231_ALARM1_MATCH_SECMINHOUR, NULL, 0);
// Use DS3231_ALARM1_MATCH_MINHOUR for production (matches only minutes)
ds3231_set_alarm(&dev, DS3231_ALARM_1, &alarm_time, DS3231_ALARM1_MATCH_MINHOUR, NULL, 0);
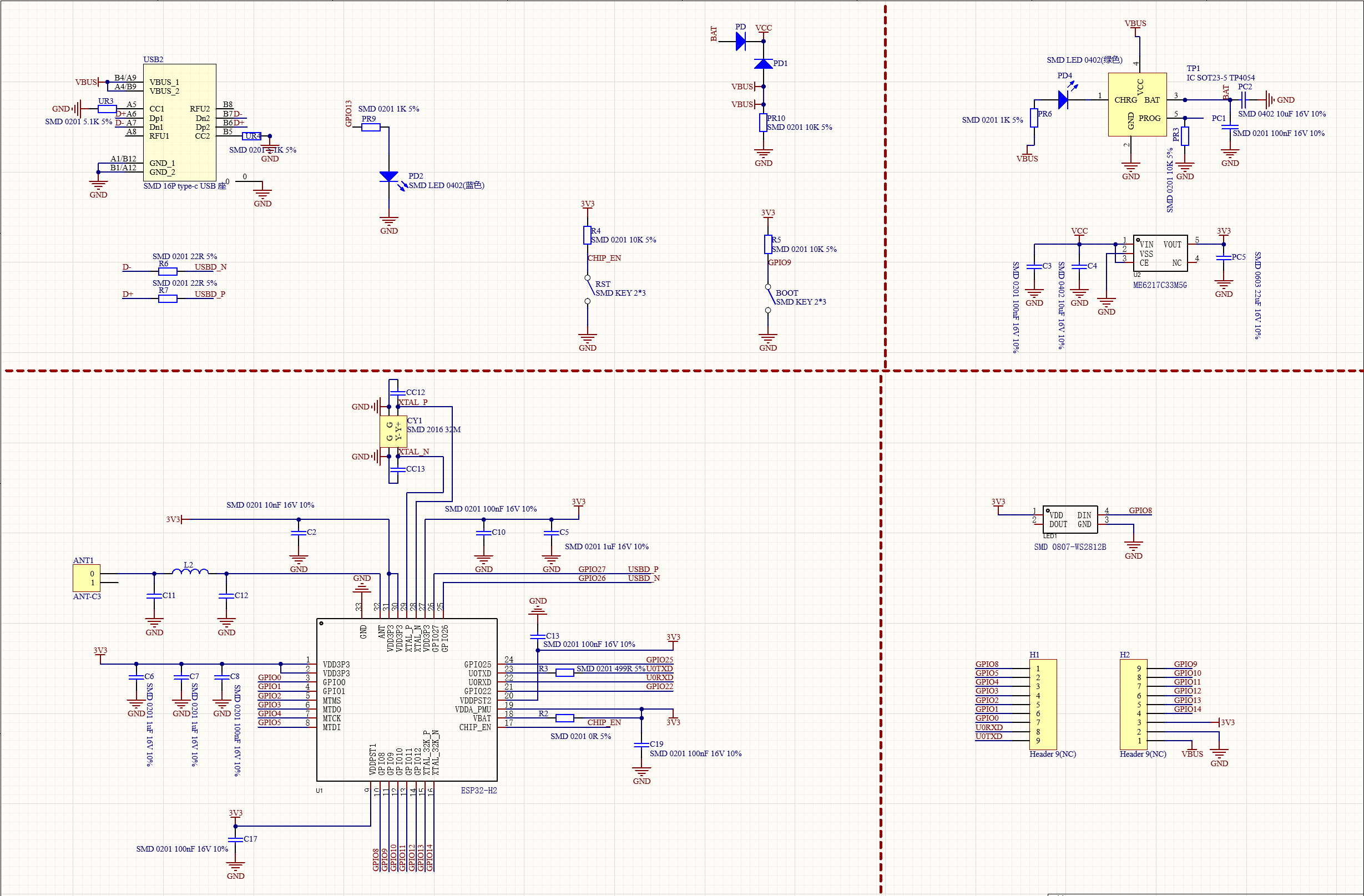
Zudem war noch wichtig beim DS3231 Modul das Widerstandsarray zu versetzen da der oberste Widerstand im oberen Array den SQW Pin mit 4,7kOhm auf VCC verbindet:
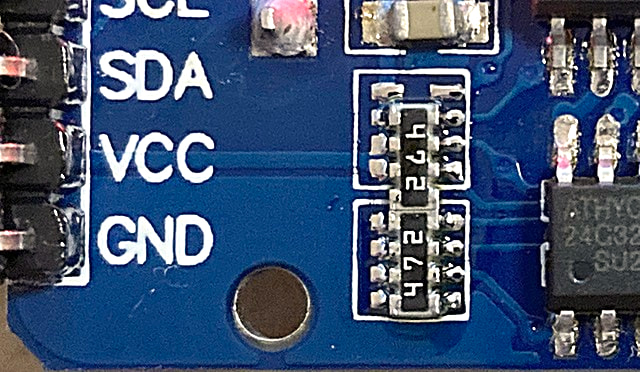
Das Problem hierbei ist das im VBAT Modus mit VCC auf GND (via GPIO14) dieser Widerstand wie ein Pulldown wirkt und den Drain des SQW-Pin entlädt. So kann dieser kein ordentliches LOW mehr erzeugen und die Alarmauslösung kommt nicht an.
Nach umlöten funktioniert das nun einwandfrei.
I (441) LED_STRIP_CTRL: Alarmzeit: 01.01.2000 00:00:15
I (451) LED_STRIP_CTRL: ⏰ Zeit: 00:00:00 | GPIO14: HIGH | Alarm-Flag: Gelöscht
I (1451) LED_STRIP_CTRL: ⏰ Zeit: 00:00:01 | GPIO14: HIGH | Alarm-Flag: Gelöscht
I (2451) LED_STRIP_CTRL: ⏰ Zeit: 00:00:02 | GPIO14: HIGH | Alarm-Flag: Gelöscht
I (3451) LED_STRIP_CTRL: ⏰ Zeit: 00:00:03 | GPIO14: HIGH | Alarm-Flag: Gelöscht
I (4451) LED_STRIP_CTRL: ⏰ Zeit: 00:00:04 | GPIO14: HIGH | Alarm-Flag: Gelöscht
I (5451) LED_STRIP_CTRL: ⏰ Zeit: 00:00:05 | GPIO14: HIGH | Alarm-Flag: Gelöscht
I (6451) LED_STRIP_CTRL: ⏰ Zeit: 00:00:06 | GPIO14: HIGH | Alarm-Flag: Gelöscht
I (7451) LED_STRIP_CTRL: ⏰ Zeit: 00:00:07 | GPIO14: HIGH | Alarm-Flag: Gelöscht
I (8451) LED_STRIP_CTRL: ⏰ Zeit: 00:00:08 | GPIO14: HIGH | Alarm-Flag: Gelöscht
I (9451) LED_STRIP_CTRL: ⏰ Zeit: 00:00:09 | GPIO14: HIGH | Alarm-Flag: Gelöscht
I (10451) LED_STRIP_CTRL: ⏰ Zeit: 00:00:10 | GPIO14: HIGH | Alarm-Flag: Gelöscht
I (11451) LED_STRIP_CTRL: ⏰ Zeit: 00:00:11 | GPIO14: HIGH | Alarm-Flag: Gelöscht
I (12451) LED_STRIP_CTRL: ⏰ Zeit: 00:00:12 | GPIO14: HIGH | Alarm-Flag: Gelöscht
I (13451) LED_STRIP_CTRL: ⏰ Zeit: 00:00:13 | GPIO14: HIGH | Alarm-Flag: Gelöscht
I (14451) LED_STRIP_CTRL: ⏰ Zeit: 00:00:14 | GPIO14: HIGH | Alarm-Flag: Gelöscht
I (15451) LED_STRIP_CTRL: ⏰ Zeit: 00:00:15 | GPIO14: LOW | Alarm-Flag: GESETZT
I (16451) LED_STRIP_CTRL: ⏰ Zeit: 00:00:16 | GPIO14: LOW | Alarm-Flag: GESETZT
I (17451) LED_STRIP_CTRL: ⏰ Zeit: 00:00:17 | GPIO14: LOW | Alarm-Flag: GESETZT