Ich und Mcgaiver sind gerade dabei ein Kameraslider für Focus-stacking zu basteln.
Jeder auf seine weiße.
Das hier ist meiner.
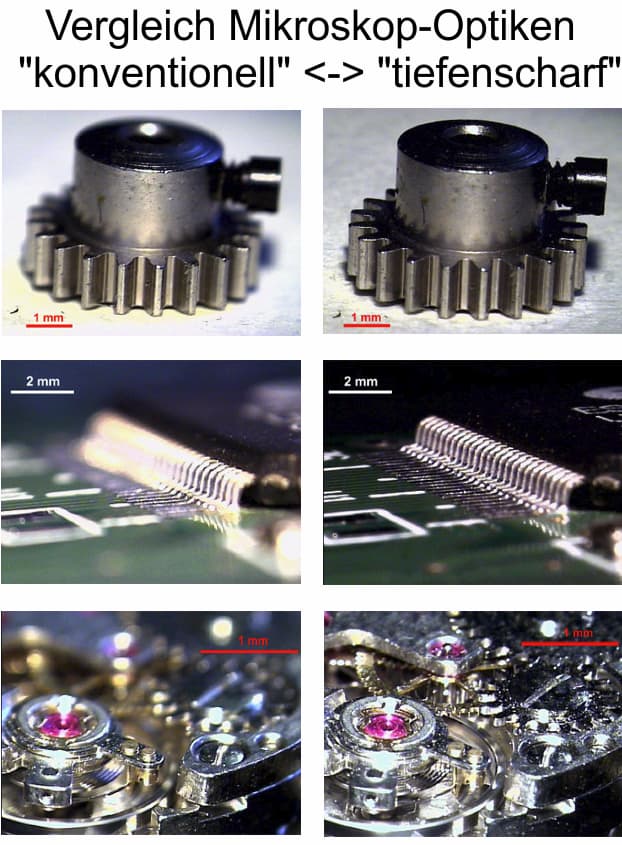
Beim Focus stacking werden viele Bilder vom selben objekt mit verschiedenen Fokusdistanzen gemacht damit man die Tiefenunschärfe umgehen kann.
Bei extremen Makros hat man meist nur ein zehntel Millimeter in dem alles scharf ist, das was man fotografieren will ist aber meist dicker als das. also klebt man viele fokus-schnitte einfach zusammen.
Das funktioniert sehr gut mit Picolay https://www.picolay.de/
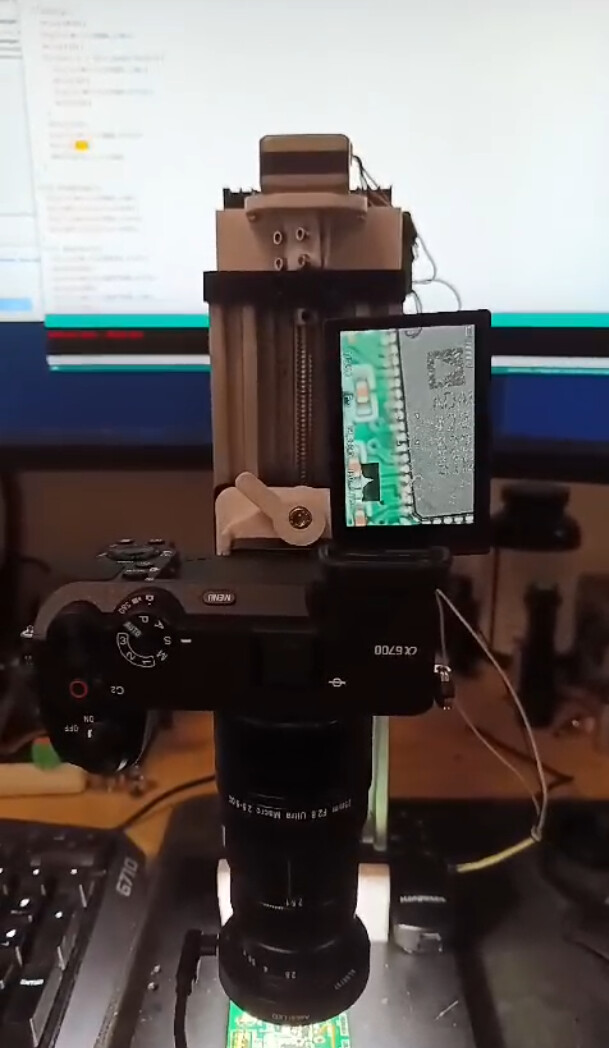
Bei den Kameras nutze ich eine A6700 und ein LAOWA 25mm Ultra Macro 2,5-5x Ultra Macro mit Ringlicht. evtl. probiere ich mal ein Blitz mit softbox aus damit man keine Reflektions-ringe hat.
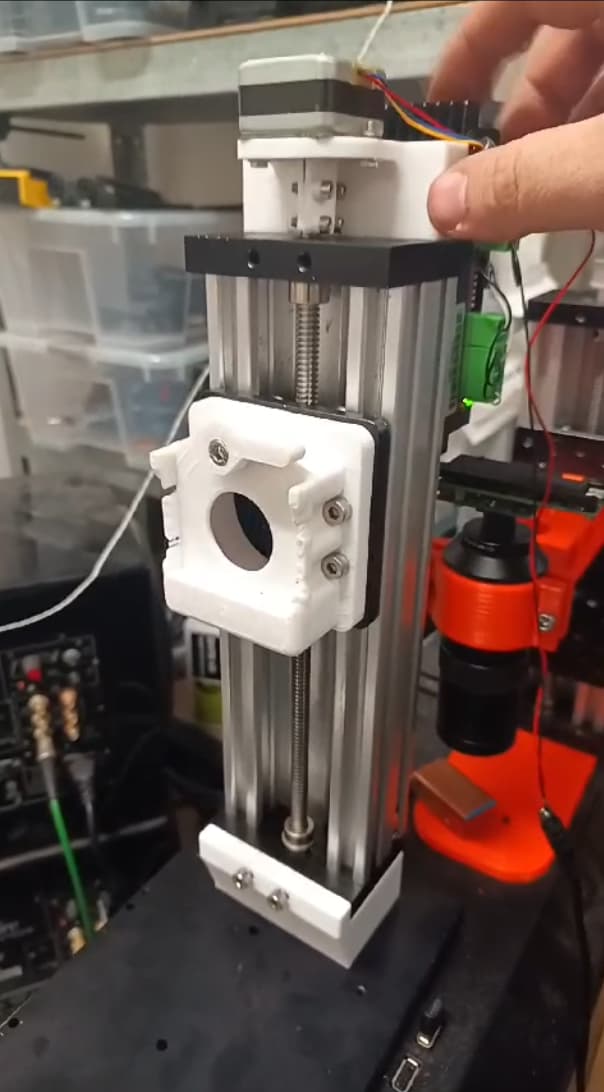
Der Slider:
Mein Slider besteht aus einer Openbuilds linear-achse mit 200mm, effektiv eher 150mm da der Wagen ja auch eine gewisse breite hat.
Der Stativadapterhalter und alles darauffolgende wurde in PLA 3D gedruckt.
(Hier noch zum testen meine alte A6300 montiert.)
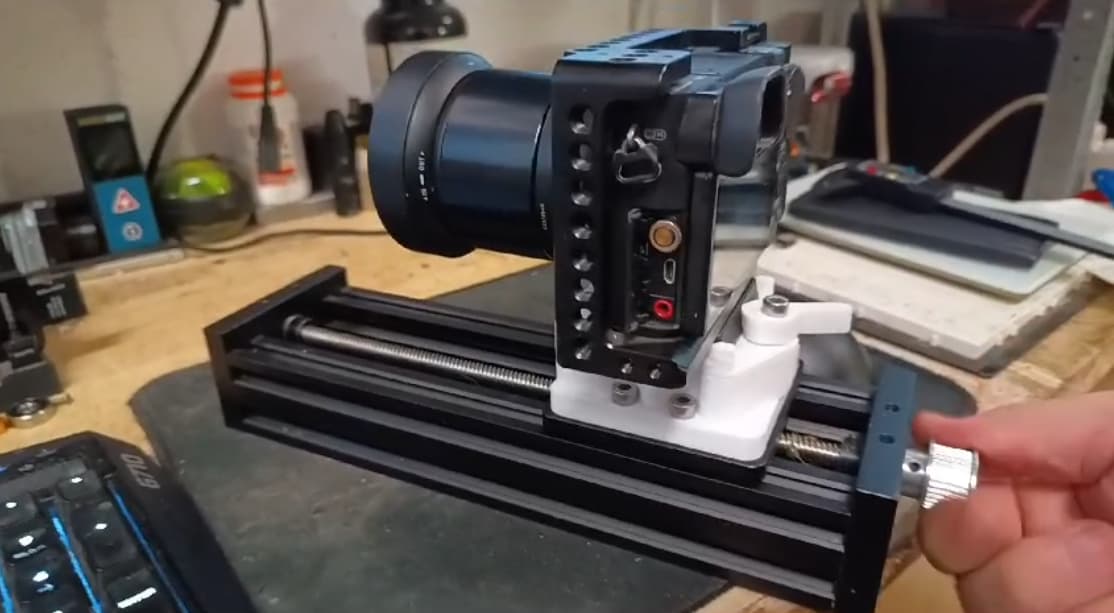

Über eine TR8x1 Trapezgewindestange wird der Wagen über ein Schrittmotor angetrieben.
Bei 400 schritten pro umdrehung sind das theoretisch 2.5µm pro schritt.
Mit zwei tasten kann ich den wagen fein und grob positionieren, mit einer dritten die Schrittweite im Stacking auswählen und mit der dritten startet es.
Versorgt wird alles über 24V und gesteuert über ein Arduino.
Der Code dazu ist der übelste Delayhaufen. Wenn ich es jemals umbauen würde, nutz ich libraries wie Button Debouncer und AccelStepper… Aber funktioniert.
Er fährt ein stück, macht ein foto, fährt wieder und so weiter.
Mittlerweile habe ich die Basisplatte mit einer 1cm dicken Aluplatte versehen, damit es weniger wackelt im Handbetrieb.
Der Auslöser:
Da meine neue Kamera kein Fernsteuerungs-port mehr hat, geschweige denn IR empfangen kann musste was neues her.
Die Kamera nutzt nun BLE Bluetooth dafür…
Daraufhin hab ich mir eine billige Fernbedienung bestellt und auf externe-steuerung modifiziert.
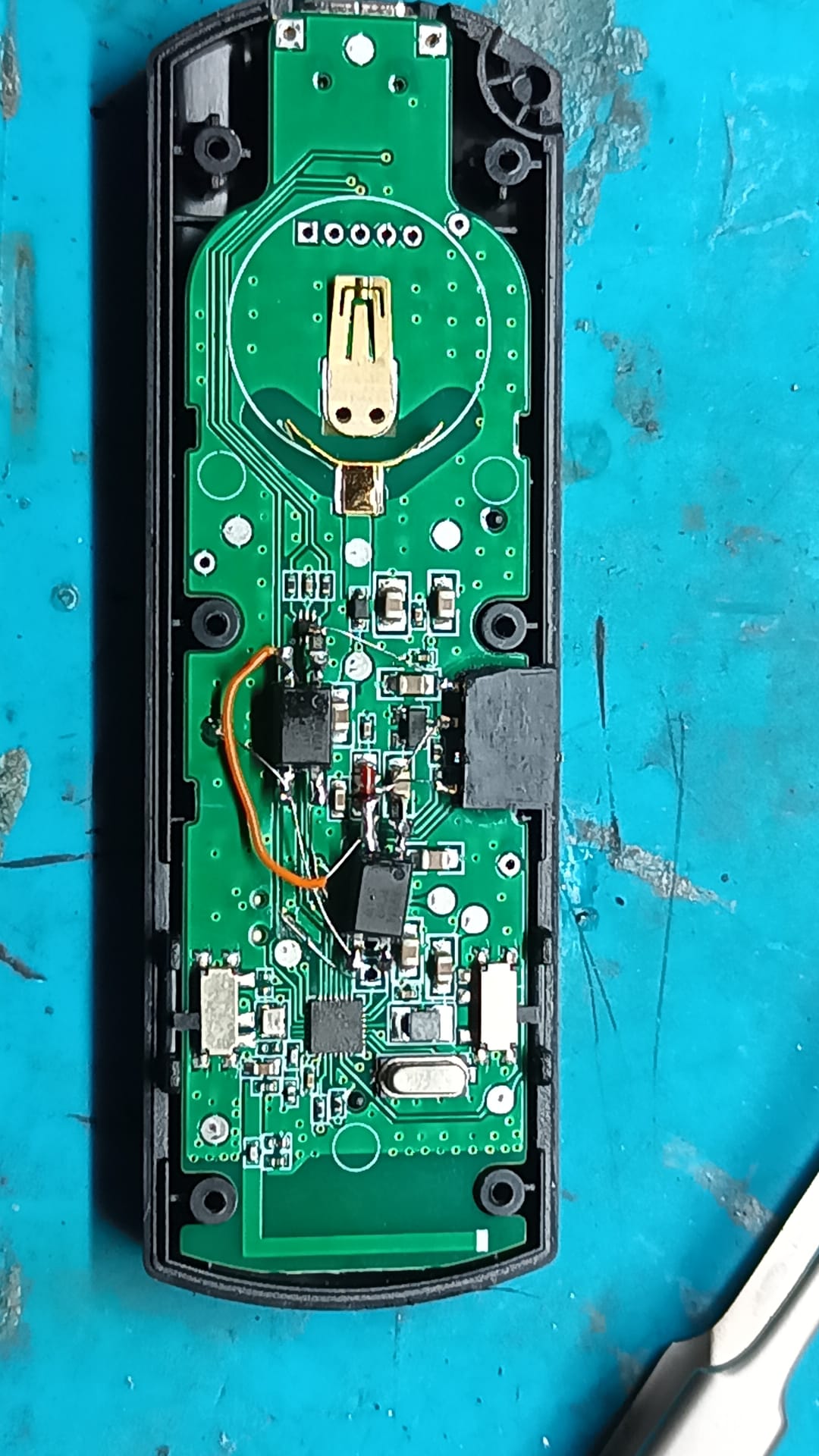
Zwei optokoppler mit vorwiderstände die die leitungen des Fokus und Shutter Tasters auf masse ziehen.
Funktioniert sehr gut. Seitlich ist ein Pinheader mit dem ich die fernbedienung auch trennen und normal nutze kann. Geplant war eigentlich ein 3.5mm klinkensockel, aber hatte keinen mehr der passte.
Das timing muss ich aber noch etwas anpassen, da die Remote ja nicht weiß, ob die Kamera schon wieder bereit ist ein foto aufzunehmen. Bei längeren belichtungen eher unbrauchbar.
In arbeit sieht das ganze dann so aus:
Gestackt wird in Picolay, dazu einfach alle fotos reinladen und auf Stack drücken, keine einstellungen nötig.
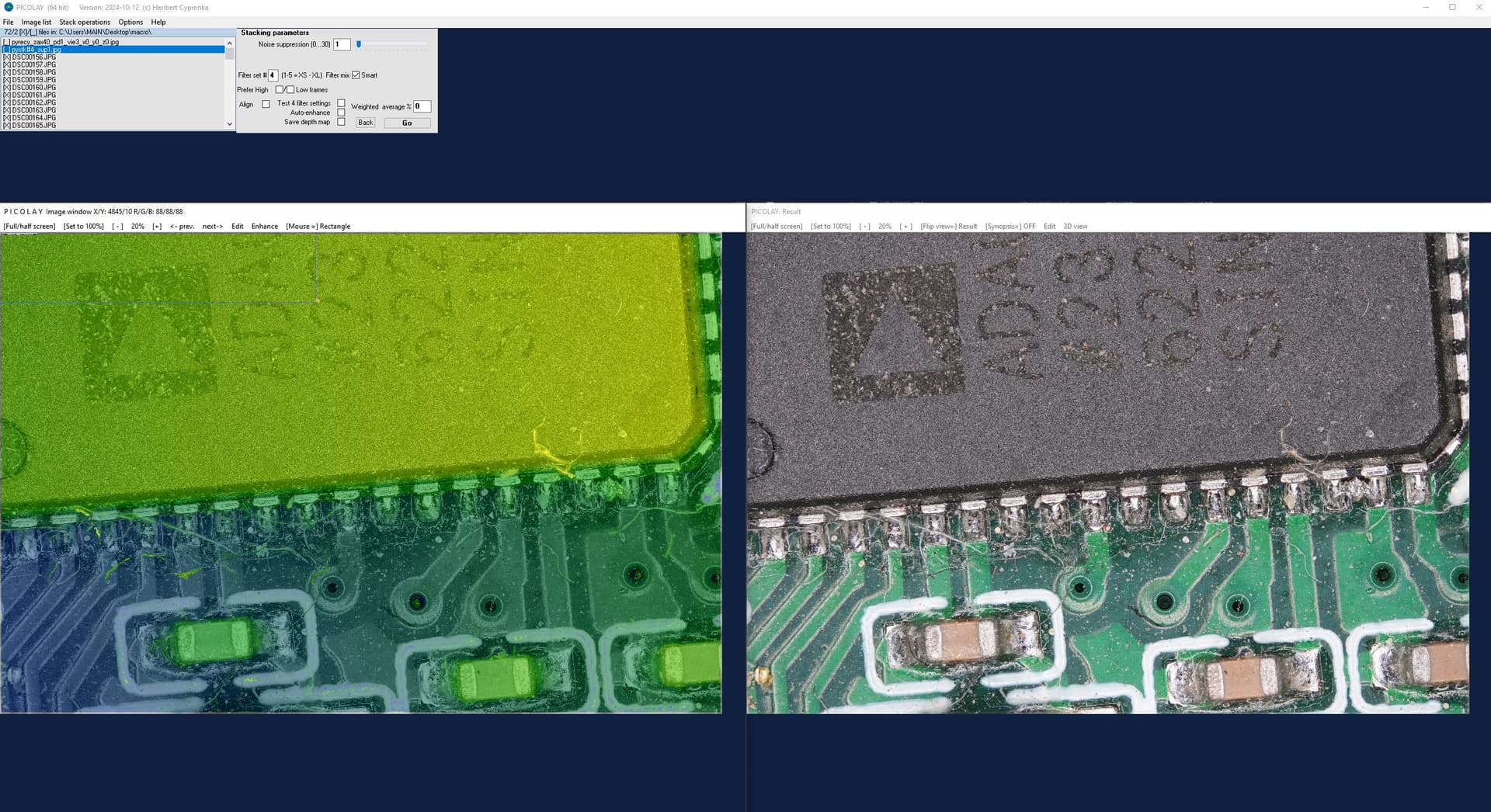
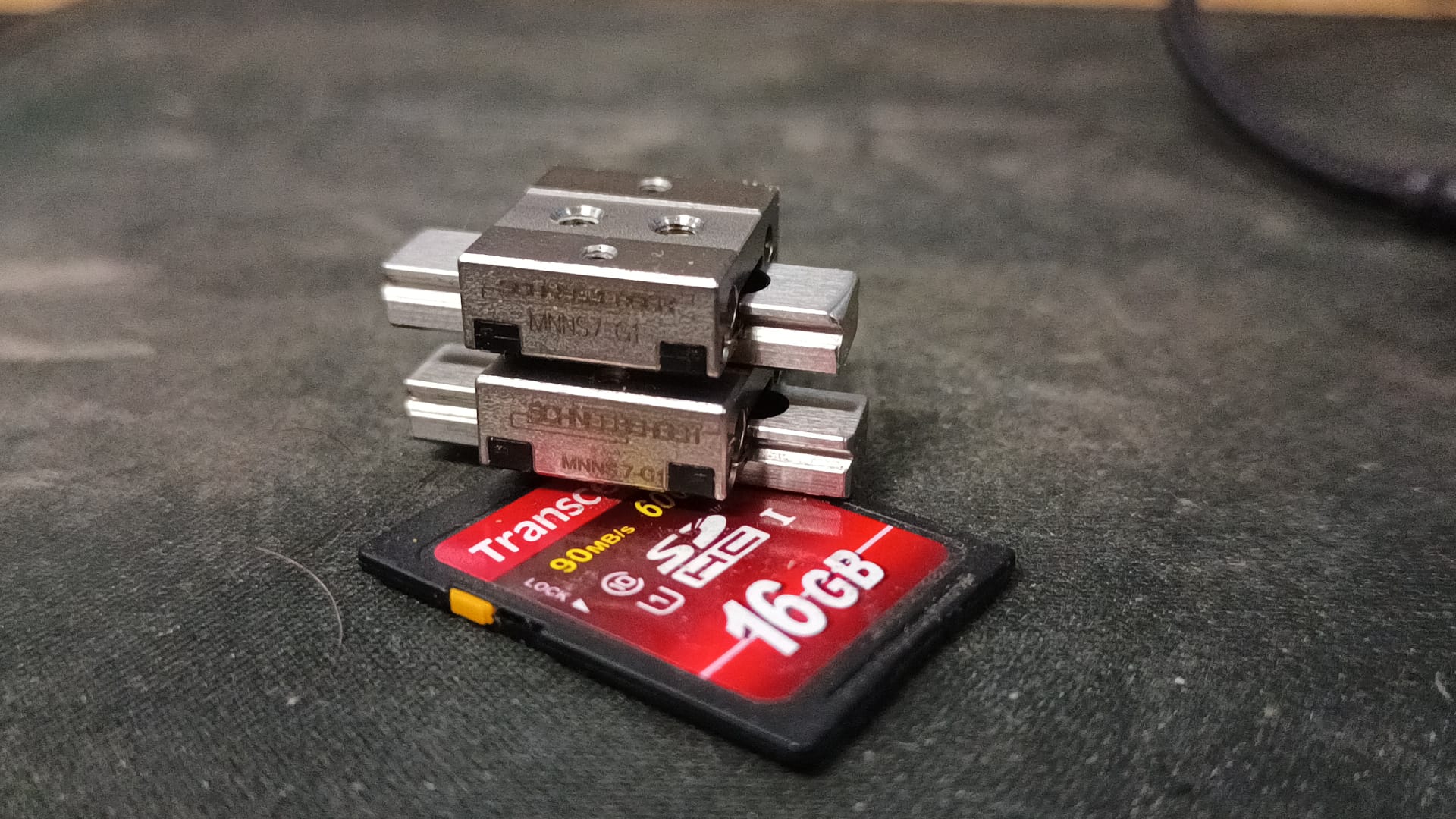
So sieht eines der Rohbilder aus, nur ein winziger bruchteil davon ist scharf.

ca. 70 bilder später sehen die resultate in etwa so aus:

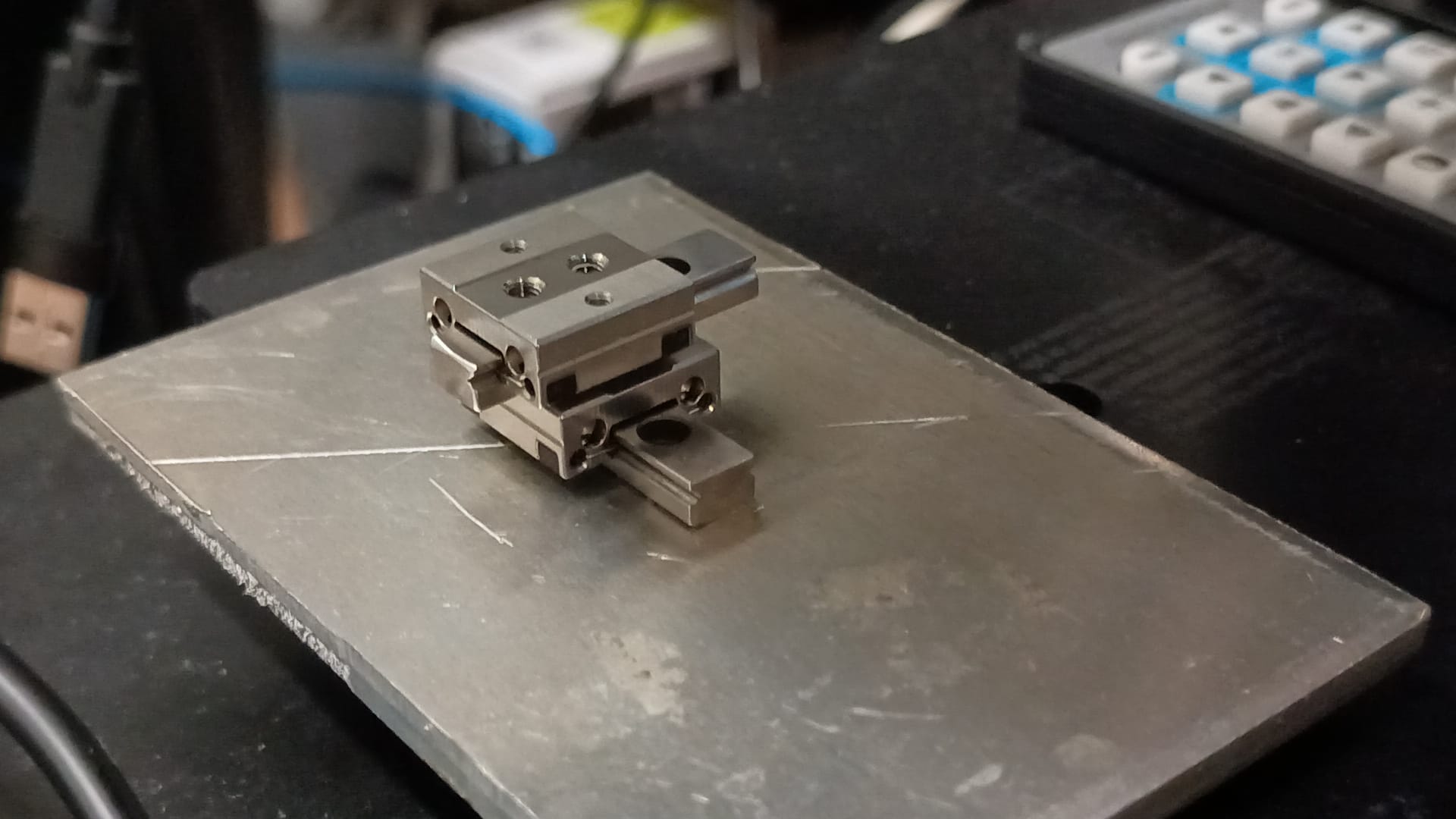
Hier noch welche im Handbetrieb ohne Auto-auslöser:
Das hier kommt dabei raus, wenn man zu wenig Bilder macht oder die schrittweite zu weit einstellt. Einige bereiche sind weiterhin unscharf und daher leicht verzerrt.
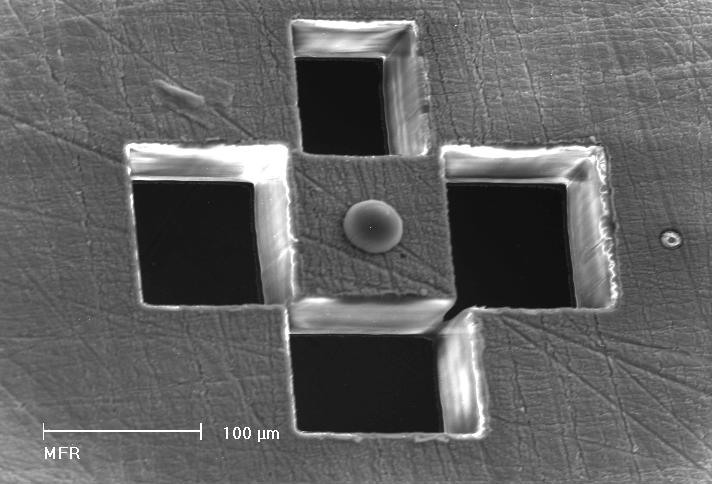
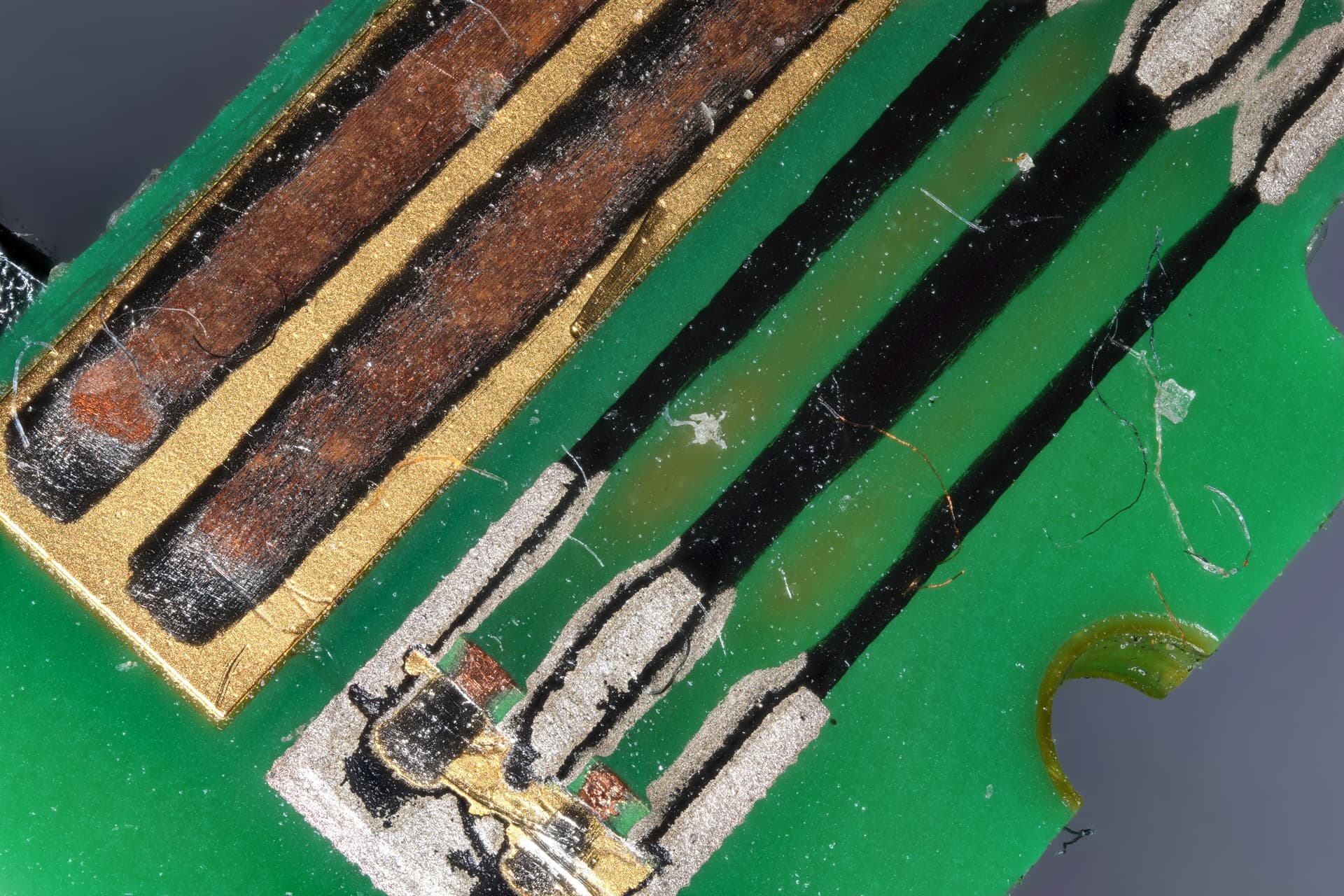
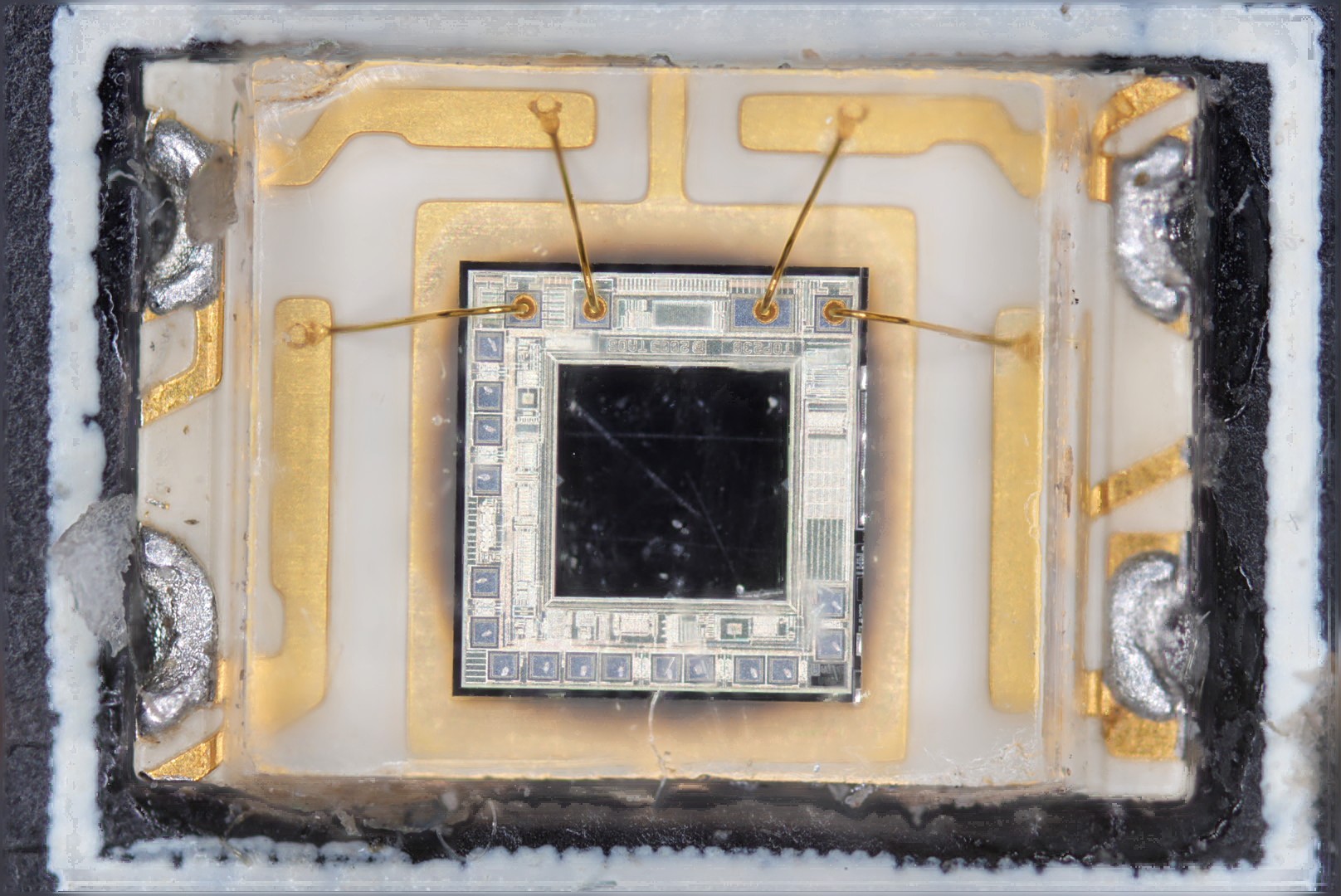
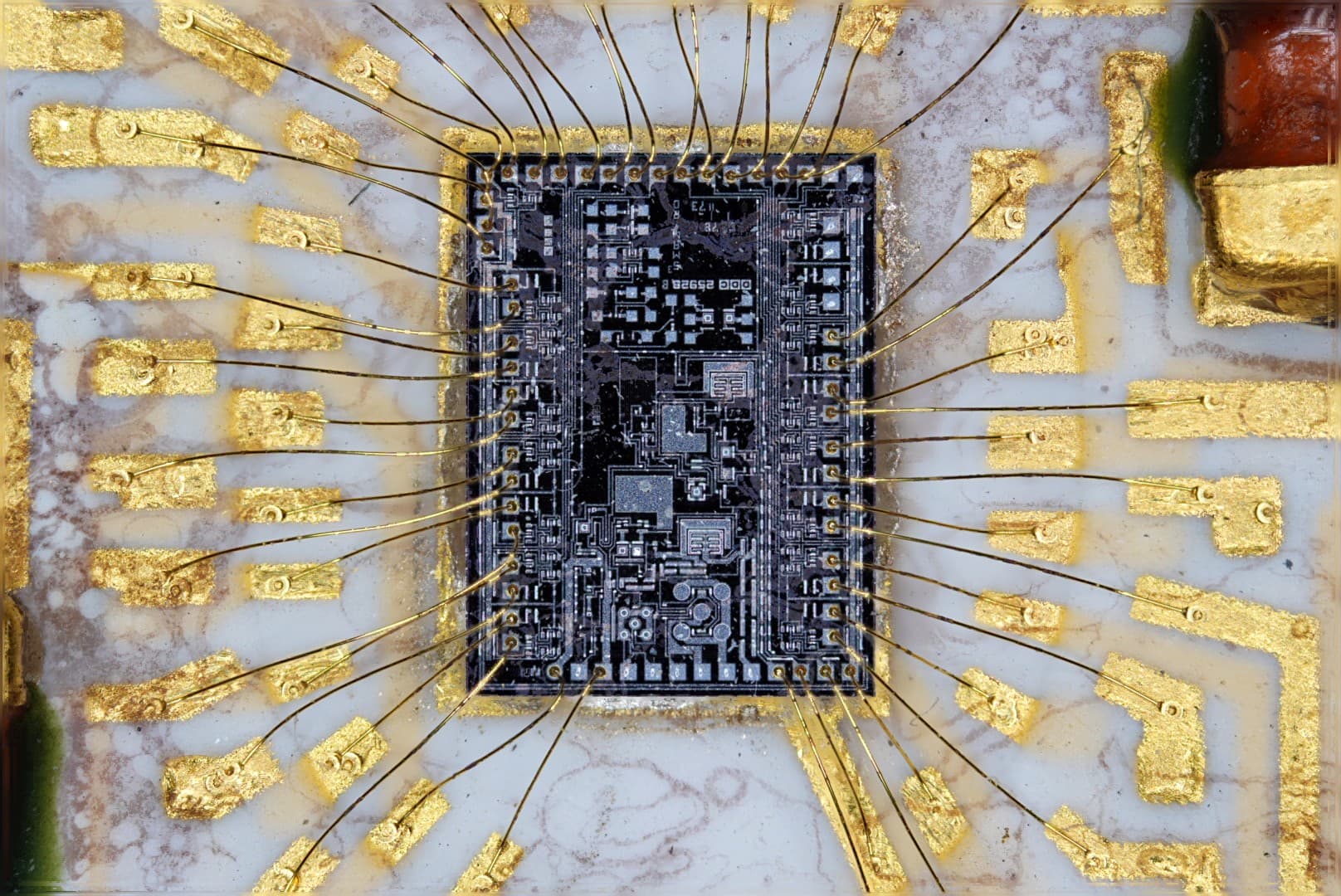
Ich bastel nebenbei noch eine vorrichtung für Die-shots, bilder vom Silizium in den IC’s
Eine methode die aus den Plastikgehäusen zu entfernen funktioniert sehr gut…
Einfach abfackeln. Wenn es aufhört zu rauchen, bricht man den keks um den chip einfach weg.
Die Resultate sehen so aus:
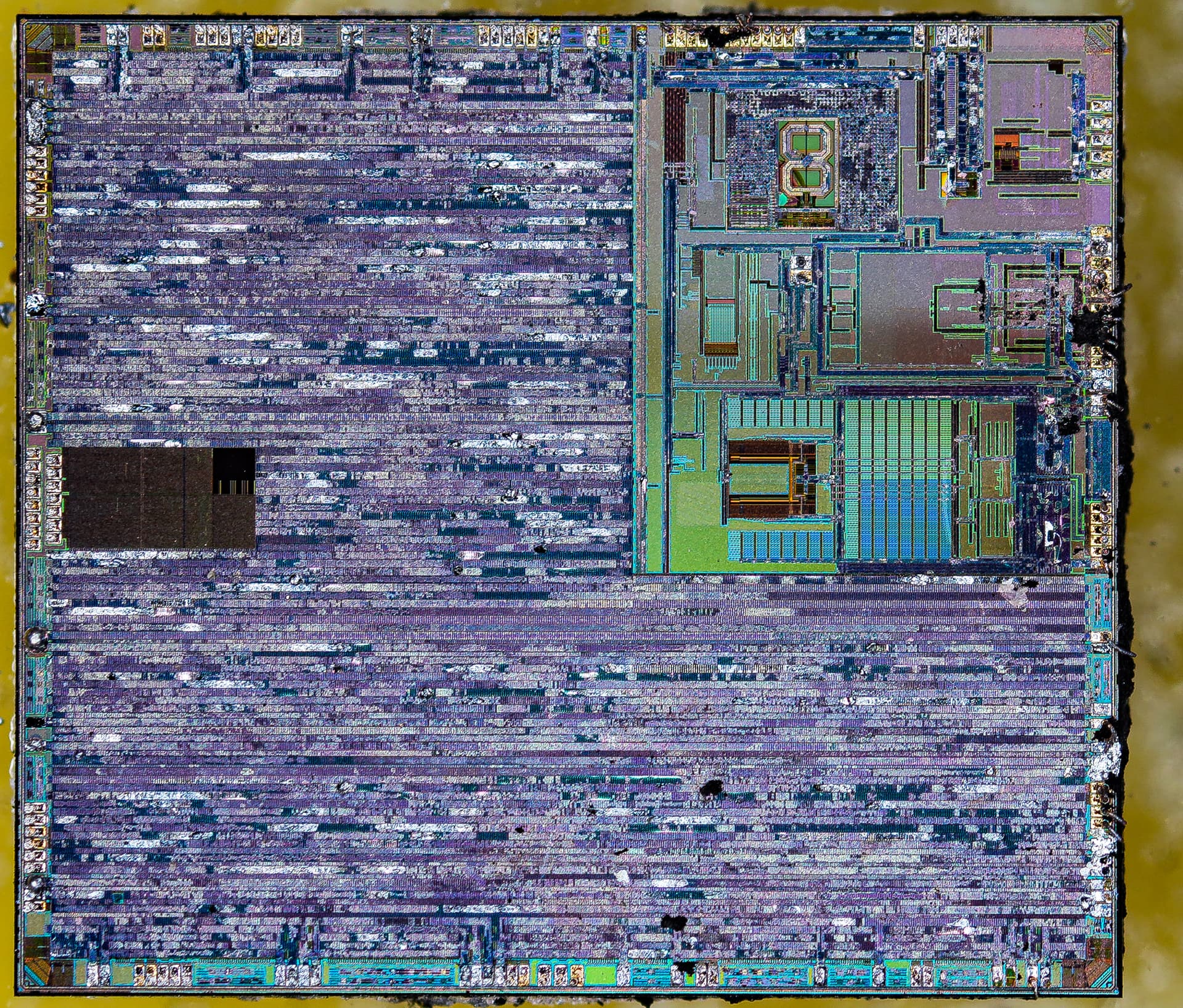
Für größere Chips muss ich mir mal ein XY-Kreuztisch Stepper bauen der ein Mosaik aus vielen bildern aufnehmen kann.
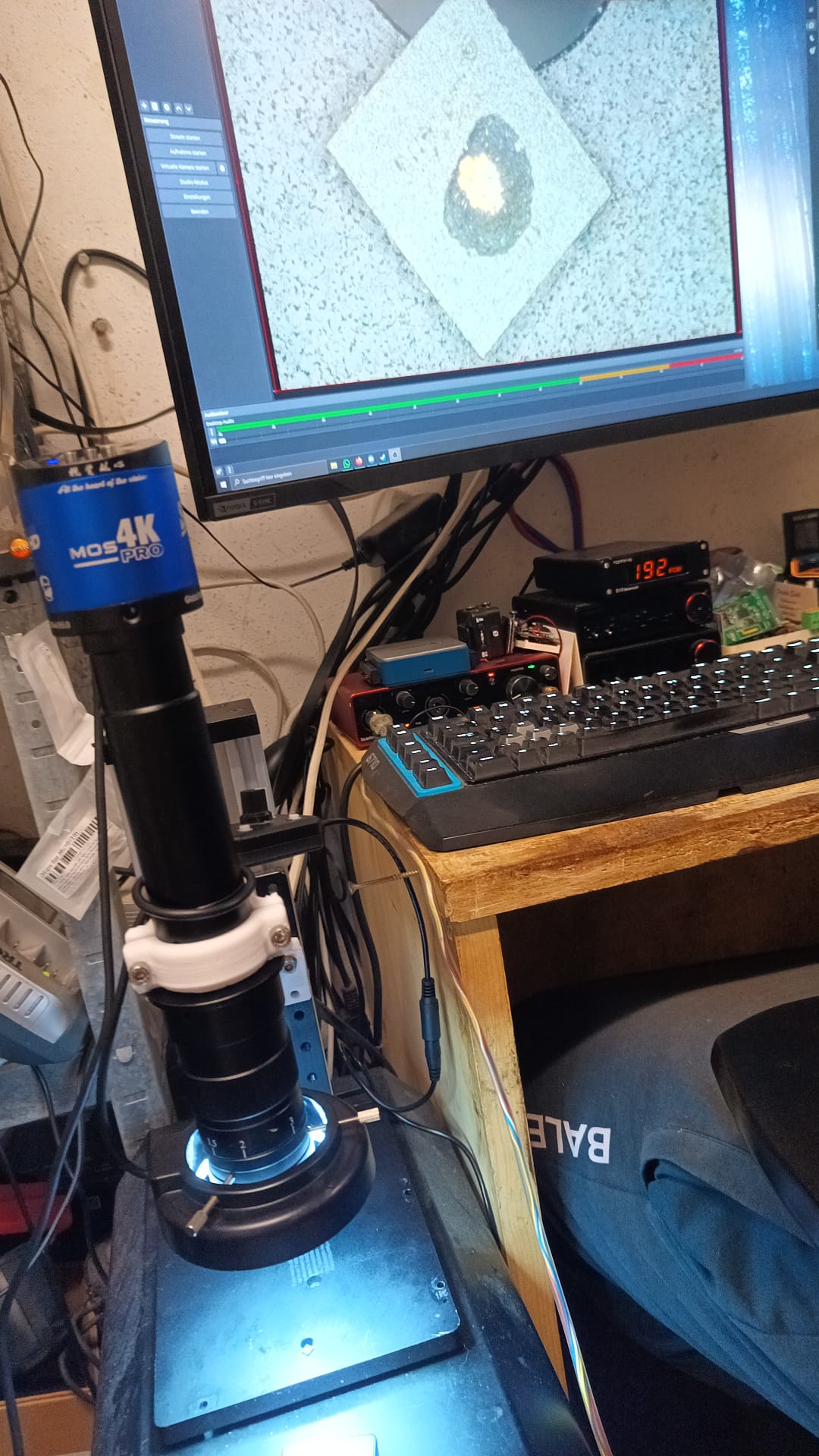
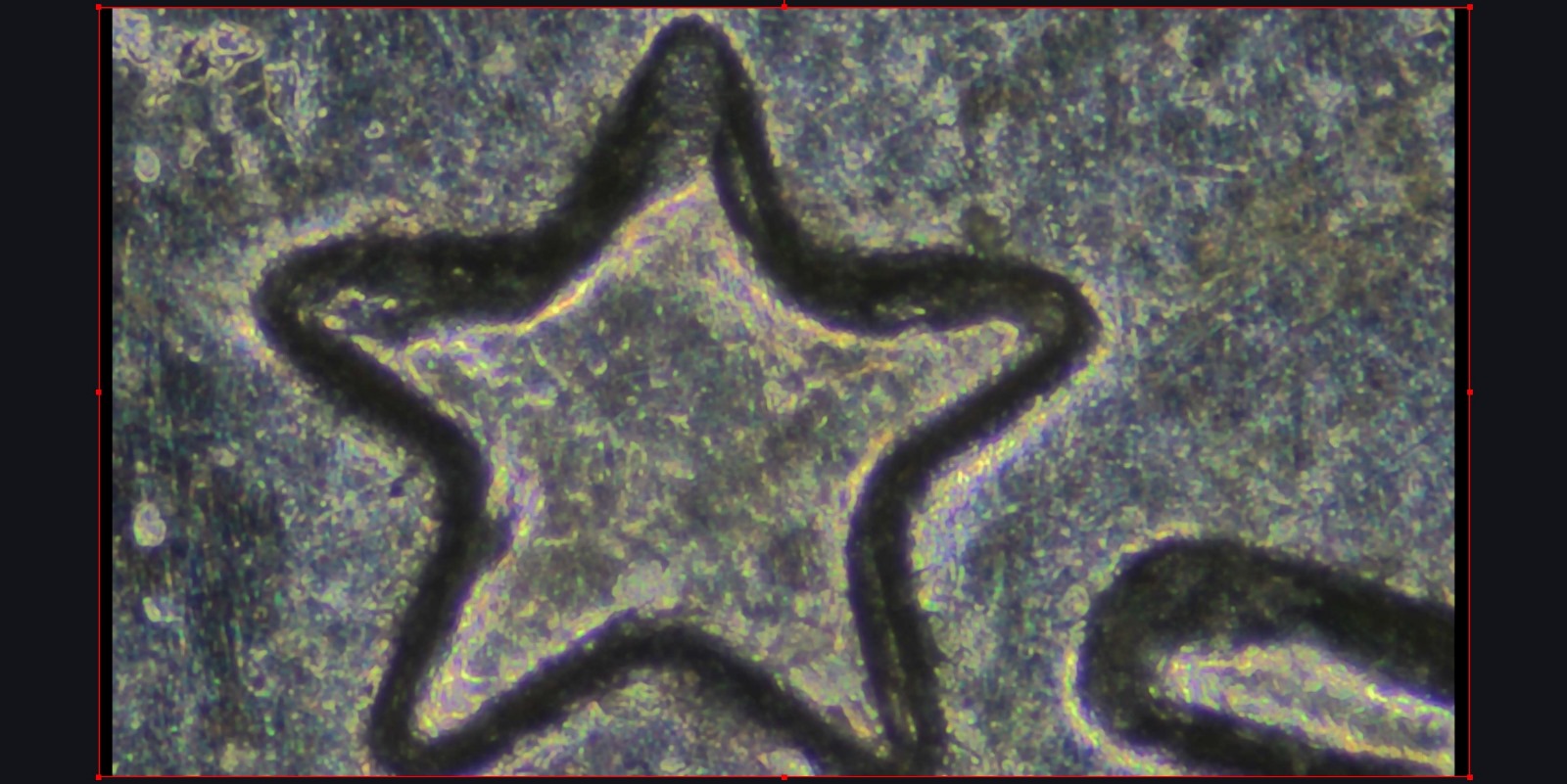
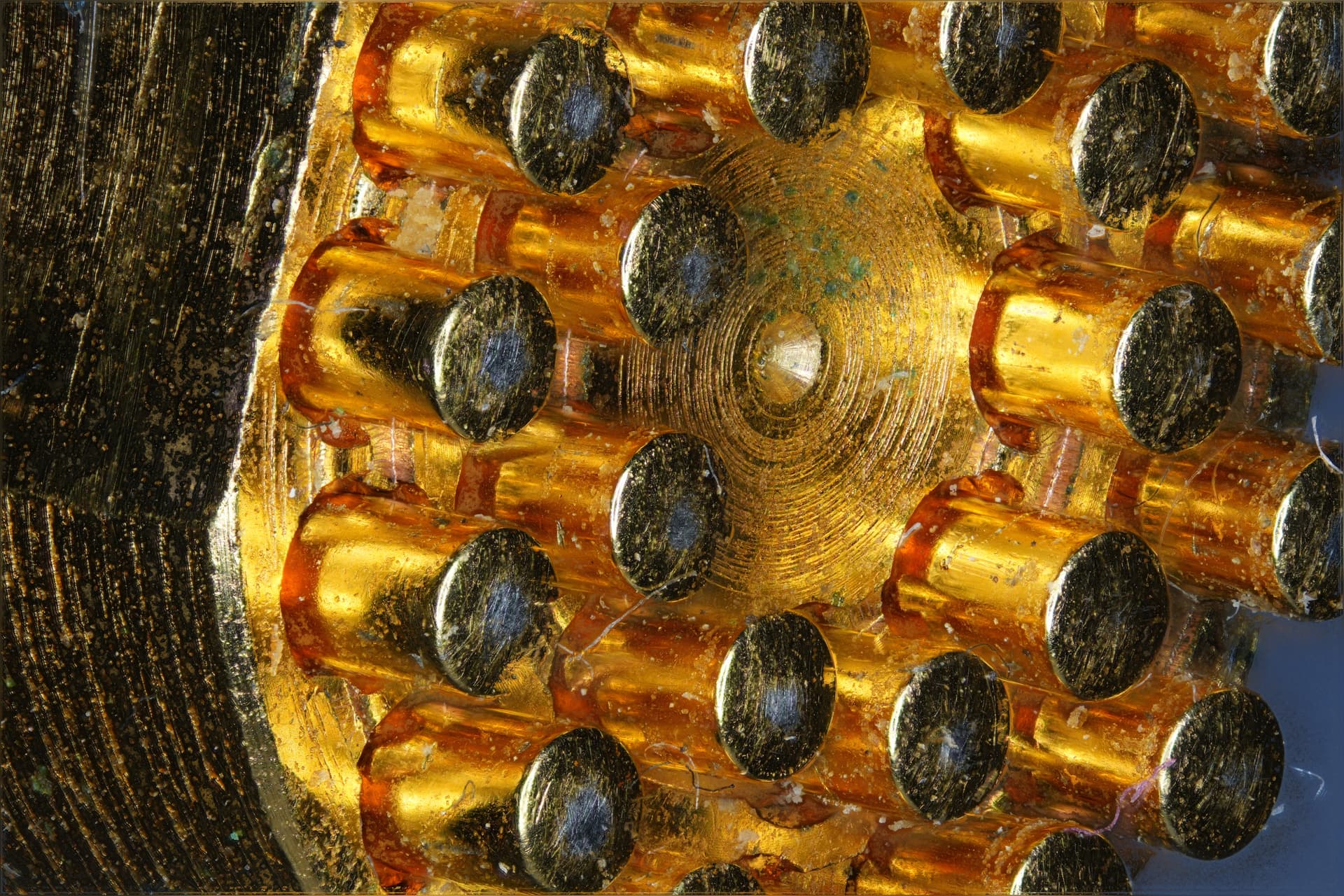
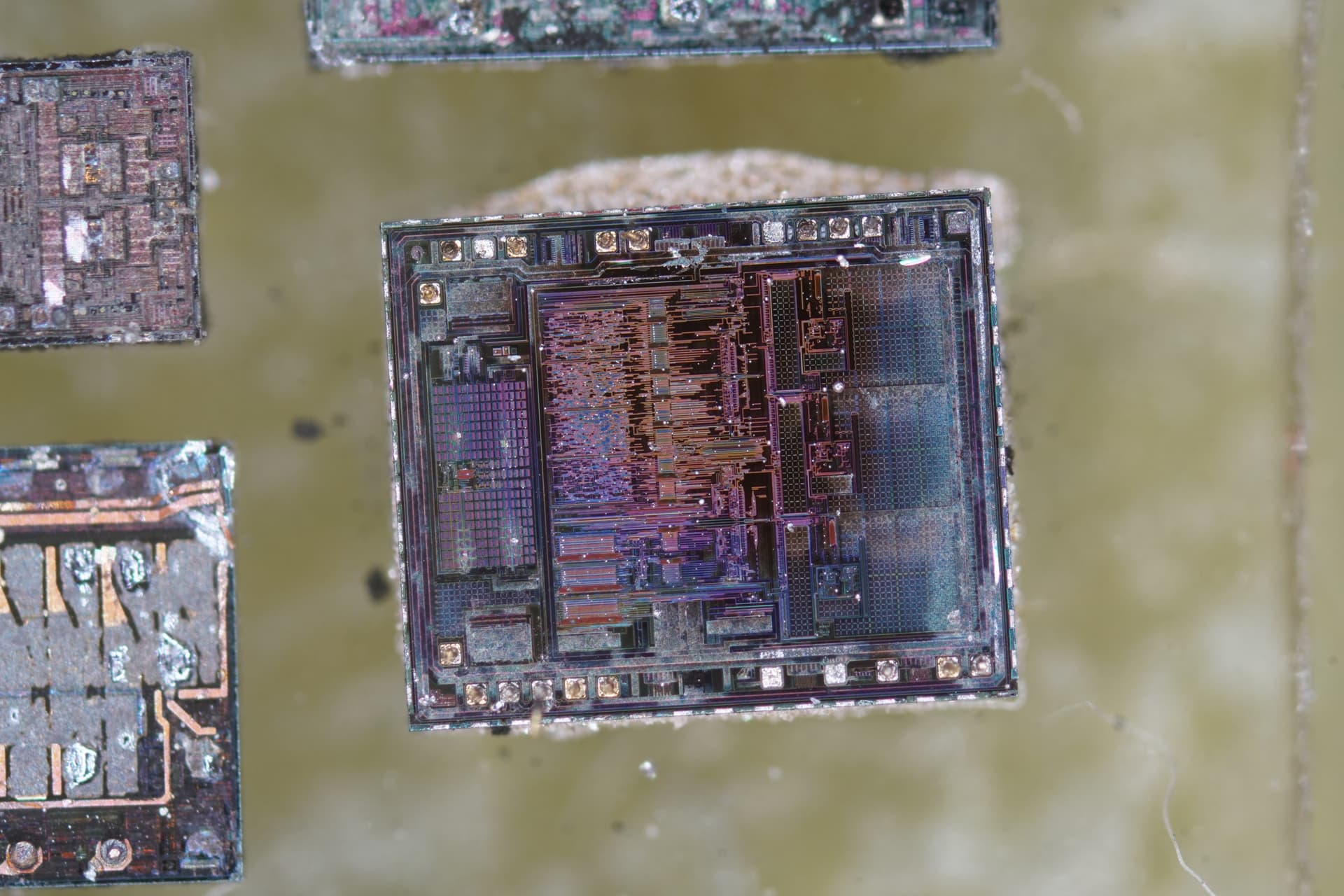
Aufbau 2:
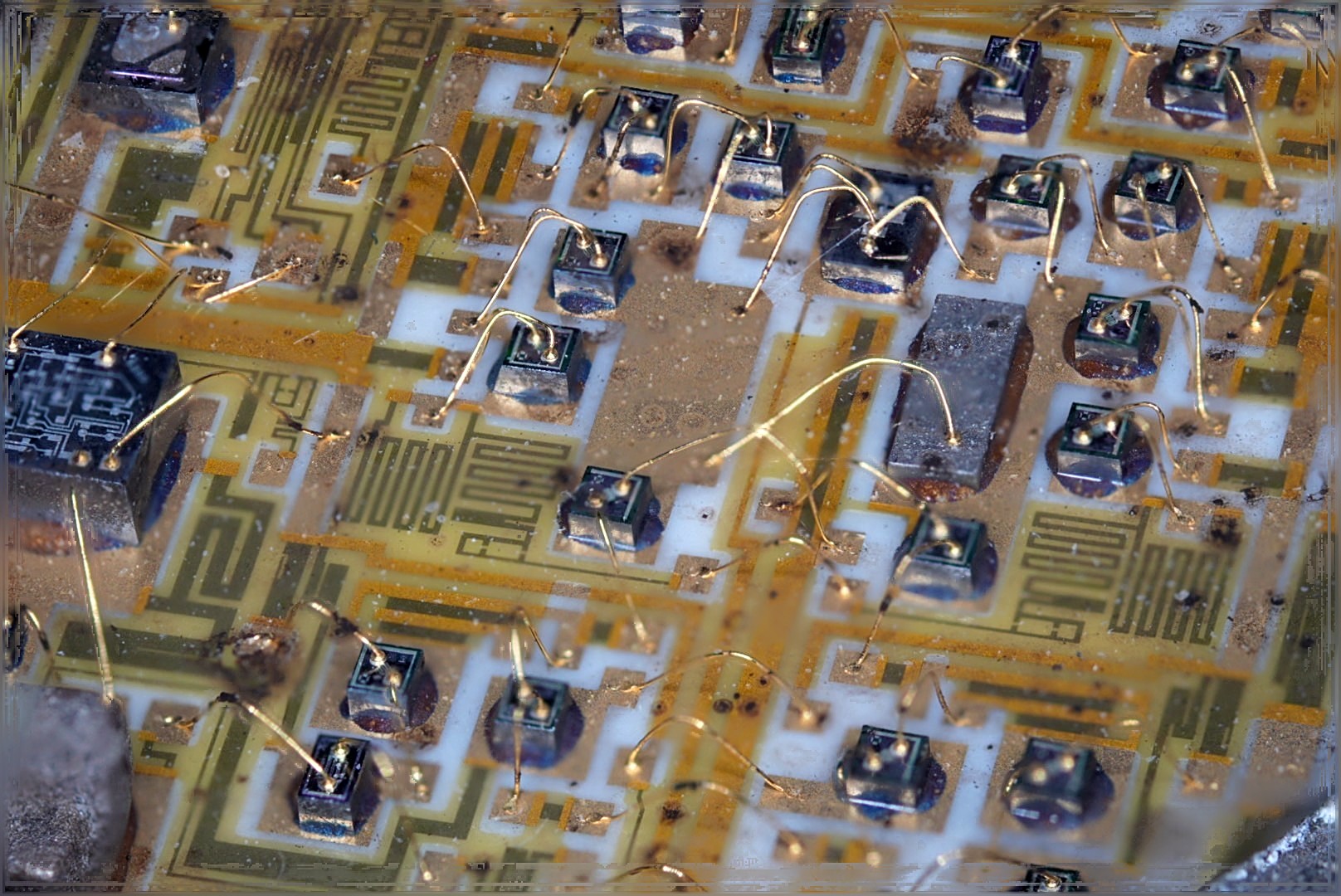
Hier wird eine Aliexpress “mos 4k pro” kamera von mechanic zusammen mit einem 300x objektiv und ringlicht genutzt.
Noch ohne stacking.
Die Bildqualität ist akzeptabel finde ich. Bei weitem nicht so gut wie mit der anderen Kamera.
Man kommt aber viel näher ran.